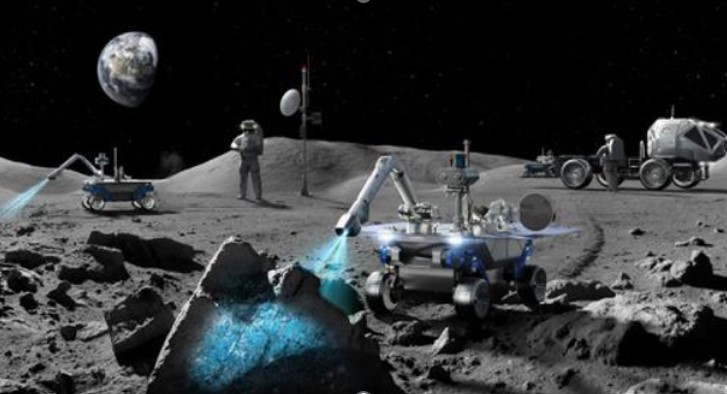
현대자동차그룹은 당초에 계획했던 바퀴 형태의 로봇이 아닌 네 다리로 이동하는 방식의 달 탐사 로봇을 개발하는 방안을 검토하고 있습니다. 네 다리로 이동 시 달 표면의 지형과 상관없이 활발한 탐사 활동이 가능할 것으로 판단했기 때문입니다.
※ 다양한 4족 보행 로봇들
로봇 전문기업 다이내믹스에서 보유하고 있는 4족 보행 로봇을 경험해 보시죠.
Legacy Robots | Boston Dynamics
Boston Dynamics’ legacy robots The foundation of today’s portfolio: Our future is built on the groundwork of our previous research. Each of Boston Dynamics’ legacy robots has contributed towards crucial milestones in the advancement of applied roboti
bostondynamics.com
※ 목차
1. 달 지형에 상관없는 탐사활동
현대차그룹은 지난해 7월 한국천문연구원 등 6개 연구기관과 업무협약을 체결하며 로버 제작에 착수했으며,
올해 4월에는 네 바퀴가 달린 로버 개발 모델의 콘셉트 이미지를 공개했는데 이를 바퀴에서 다리로 교체하는 안을 고민하는 것으로 보입니다.

2. 우주 모빌리티 탐사로봇 경쟁
이는 우주로 모빌리티 영토를 확장하는 현대차그룹이 경쟁 업체와의 차별점을 부각하려는 전략으로 풀이됩니다.
미국 테슬라와 제너럴모터스(GM), 일본 도요타 등이 달 탐사를 위한 모빌리티 사업에 뛰어들면서 시장 경쟁이 치열해지고 있습니다.
현대차그룹은 로버에 태양광을 통한 자체 충전 시스템과 자율주행 기술을 적용할 예정으로,
이에 더해 구동계 역할을 하는 로버 하부를 네 개의 다리로 제작할 경우 지형에 제한받지 않고 자유롭게 이동하며 임무를 수행할 수 있는 장점을 얻게 됩니다.
3. 4족 보행 로봇 기술
현대차그룹은 세계 최고의 4족 보행 로봇 기술을 보유하고 있어 기술 개발에 속도를 낼 것으로 기대됩니다.
현대차그룹이 2021년 인수한 로봇 전문 기업인 미국 보스턴 다이내믹스는 4족 보행 로봇 스팟을 개발한 바 있습니다.
스팟은 인공기능(AI) 기반으로 장애물을 감지하고 자율적으로 이동하는 등 세계적인 기술을 보유하고 있습니다.
현재 사람이 접근하기 어려운 재난·재해 현장 등에서 활용되며 상용화 단계에 도달한 상태입니다.
4. 해결 과제들
NASA에서 추진 중인 ‘아르테미스’ 달 탐사 프로젝트에 참여하는 것을 목표로 하고 있지만 아직 협의 단계에 머물고 있습니다.
또, 달에 로버를 착륙시키기 위해 막대한 비용도 발생할 것으로 보입니다.
아울러 낮과 밤의 기온차이가 큰 달 표면 환경에서 임무 수행을 하기 위해서는 높은 수준의 기술력이 뒷받침되어야 할 것입니다.
※ 다양한 4족 보행 로봇들
로봇 전문기업 다이내믹스에서 보유하고 있는 4족 보행 로봇을 경험해 보시죠.
* Boston Dynamics' amazing robots Atlas and Handle
현대차그룹은 2027년을 목표로 실제 달 표면을 탐사할 수 있는 탐사로봇을 선보일 계획입니다.
달 탐사 모빌리티 개발은 미래 사업에 대한 정 회장의 강한 의지가 반영된 사업으로, 로버뿐 아니라 다양한 범용 플랫폼을 개발하는 것을 목표로 진행하고 있습니다.
이건 어때요?
화성에 강진 원인 인사이트 착륙선 감지
지구를 제외한 태양계 행성 가운데 암석형 행성인 수성, 금성, 화성 등에서도 지진이 발생하는 것으로 알려져 있습니다. 이 가운데 가장 큰 규모의 지진은 2022년 화성에서 발생한 규모 5에 해당
bbaggomi.co.kr
인도 유인 달 탐사 계획 발표 찬드라얀
최근 무인 탐사선 찬드라얀 3호를 달 남극에 착륙시켜 기술력을 과시했던 인도가 이번에는 유인 달착륙을 하겠다는 청사진을 제시하며, 유인 달탐사 경쟁에 본격적으로 참여하는 모습입니다.
bbaggomi.co.kr
달 탐사 장애물 달 먼지 이슈 해결 방안
아르테미스 달 탐사가 성공하려면 이전 아폴로 탐사에서도 문제가 됐던 달 먼지를 해결해야 합니다. 달의 먼지는 강력한 정전기를 띠고 있어 어디든 쉽게 달라붙으며, 모서리가 뾰족하여 전자
bbaggomi.co.kr
'우주 은하' 카테고리의 다른 글
| 거문고자리 주요 특징 (Lyra) 현대의 별자리 88개 (3) | 2023.10.31 |
|---|---|
| 보이저 2호 소프트웨어 업데이트 (3) | 2023.10.30 |
| 중국 달기지 계획에 참여국 7곳으로 늘어 ILRS 프로젝트 (3) | 2023.10.28 |
| 클리퍼 유로파 탐사선 목성으로부터 방사선 보호 CLIPPER (3) | 2023.10.27 |
| 달 정찰 인공위성 LRO 과학장비 LROC (3) | 2023.10.26 |



